
Mechanical Arm Collection
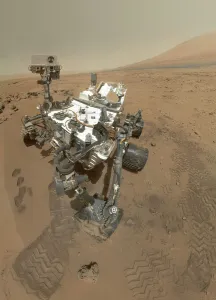
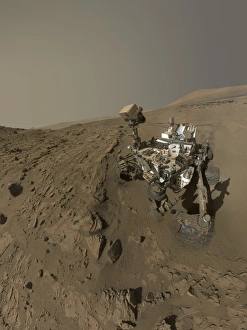
"Exploring New Frontiers: The Mechanical Arm Unveiled" From the self-portrait of Curiosity rover on the surface of Mars to its presence in Gale Crater











































All Professionally Made to Order for Quick Shipping
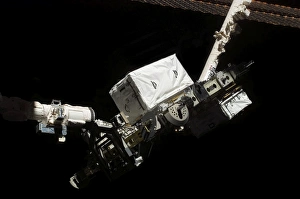
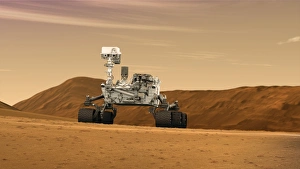
"Exploring New Frontiers: The Mechanical Arm Unveiled" From the self-portrait of Curiosity rover on the surface of Mars to its presence in Gale Crater, the mechanical arm has become an indispensable tool for space exploration. With each mission, it continues to redefine our understanding of the universe. Witnessing the release of the Hubble Space Telescope from Space Shuttle Atlantis's cargo bay was a moment that captured humanity's collective awe. It marked a new era in astronomical discoveries and showcased how crucial these robotic arms are in enabling groundbreaking research. The Japanese Experiment Module's robotic arm played a vital role in installing components, showcasing international collaboration at its finest. As we strive to unravel mysteries beyond Earth, this mechanical marvel proves that no obstacle is insurmountable when nations work together towards common goals. Mars Science Laboratory rover, Curiosity, stands as a testament to human ingenuity and determination. Its robust mechanical arm allows it to navigate treacherous Martian terrains with precision and collect invaluable data about our neighboring planet. The Canadarm2's grasp on SpaceX Dragon cargo craft exemplifies how technology intertwines with innovation. This symbiotic relationship propels us further into space exploration by delivering supplies and equipment necessary for sustained missions beyond Earth's atmosphere. With three generations of Mars rovers paving the way for future explorations, their mechanical arms have revolutionized our understanding of celestial bodies like never before. These tireless machines continue to push boundaries while expanding our knowledge about other planets within our solar system. The Canadian-built Dextre robotic system held firmly by Canadarm2 showcases Canada's expertise in robotics and its significant contributions to space exploration endeavors worldwide. Together they form an unstoppable duo capable of tackling complex tasks with utmost precision. As NASAs Curiosity rover climbs Mount Sharp on Mars' surface using its trusty mechanical arm, it symbolizes humanity's relentless pursuit of knowledge and thirst for discovery.